团队名称:医疗康复团队负责人:陈子明(电话)
研究方向:团队重点围绕智能踝关节、腕关节康复机器人、下肢康复机器人,穿戴式骨关节炎保守治疗辅助外骨骼等科学研究和技术攻关。
成果简介:
1.智能踝关节、腕关节康复机器人
针对人体关节如踝关节、腕关节开展康复机器人研究,以应对日益增长的运动损伤患者或中风患者的康复训练需求。基于人体生物关键的解剖结构,特别关注生物关节的运动学特性,以期设计出的康复机器人能更好地匹配人体的运动,从而达到更好地康复训练效果。基于踝关节和腕关节的运动轴线特点,设计了踝关节和腕关节康复机器人样机,经初步实验验证,康复机器人满足人体关节运动范围要求,匹配生物关节运动,实现了预期的康复训练功能。
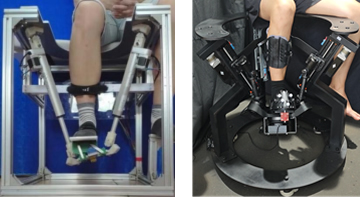
图1踝关节康复机器人
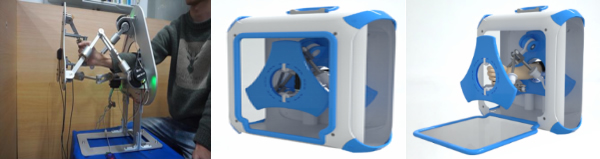
图2腕关节康复机器人
2.用于膝骨关节炎保守治疗的可穿戴外骨骼
针对中老年群体中普遍存在的膝骨关节炎病症问题,本团队研究人员从膝骨关节炎的生物力学病因入手,设计用于减轻膝关节压力及磨损的膝关节外骨骼装置,以期患者穿戴装置可进行日常生活活动。基于膝关节生理运动特性及人体步态,设计了一类能自适应轴向支撑的膝关节的外骨骼,该类外骨骼能在步态的摆动相减轻膝关节压力,在摆动相,即膝关节屈曲阶段外骨骼能适应膝关节运动,从而保证用户穿戴舒适度。经实验验证,研制的卸荷外骨骼样机能减轻膝关节压力约20%。初步临床试验表明,膝骨关节炎患者佩戴所研制的卸荷外骨骼行走过程中膝关节疼痛度明显降低。

图3用于膝骨关节炎保守治疗的膝关节外骨骼
3.下肢康复机器人
随着患有脑卒中、脑损伤等疾病导致下肢运动能力损害的患者数量增长,针对患者康复的积极性差,高效科学的恢复患者肢体的运动功能等问题,设计由躺到站多位姿训练的下肢康复机器人,以此适应患者对不同训练位姿的需求。开发基于虚拟现实技术的下肢主动康复训练模式,通过给患者视觉的反馈,激发患者参与训练的积极性;设计基于足底压力信号和表面肌电信号的阻抗控制技术提高康复训练的柔顺性;基于表面肌电信号采用神经网络实时识别患者运动意图并自主控制康复训练,提高人机间的交互性和协作性。实验结果表明,可提高患者参与训练的主动性。

图4下肢康复机器人
